3 Years as Electrical Subteam Lead
As electrical sub-team lead, I am responsible for designing and building the robot’s electrical & pneumatics system, training sub-team members, and debugging electrical and non-electrical problems under pressure as part of the pit crew during competitions. Triple Helix advanced to the FIRST World Championship in St. Louis for the last 4 years!
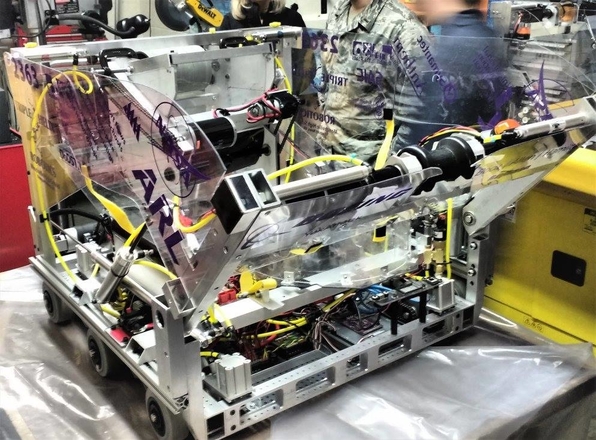
This is a picture of the robot we built in 2015 to play the game Recycle Rush. The main goal of this game is to stack totes, up to six high, and top the stack with a trashcan containing a pool noodle to get the maximum points. Our robot uses the “Doc Oc Arm”, as seen in the photo, to pick up trashcans through the center hole and put them in the claw to be held, while totes are stacked underneath them and pushes the trashcan upwards.

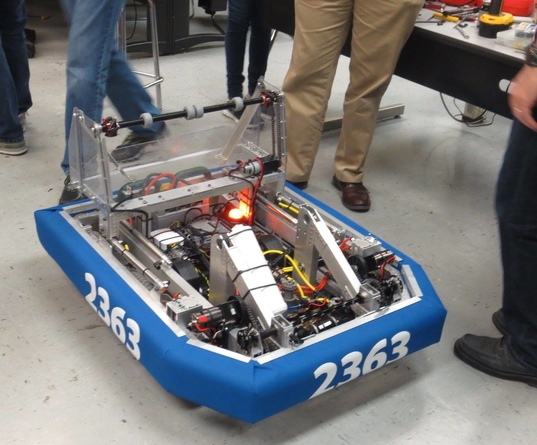
This is our 2016 robot built to play the game Stronghold. In Stronghold, robots have to cross defenses into the opponent’s field to score points by putting a ball into the high or low goal of the opponents tower. One of these defenses, called the low bar stays the same. One defense is selected by the audience. Three defenses are selected by the opposing team. We built our robot to cross all the defenses and be robust enough to score in the low goal, as well as climb and hang from the opponent’s tower at the end of the round for extra points. Our robot design did all of these things, while still managing to fit under the low bar at 16 inches high.
This is our 2017 robot built to play the game Steamworks. In Steamworks, robots score points by picking up gears from the floor and placing on the pegs, by shooting fuel into the high goal, by dumping fuel into the low goal, and by climbing our rope on the side of the “airship” at the end of the round. Our robot was built primarily to place as many gears as possible and then climb. However, during the season we were constantly trying out different fuel shooter designs at competitions. Something unique about this year’s robot is that, in addition to having our regular six wheeled drivetrain, it also had a set of four drop down caster wheels that could be deployed to lift the robot off the ground slightly, allowing for more maneuverability.